ОПРЕДЕЛЕНИЕ
Продольная волна – это волна, при распространении которой смещение частиц среды происходит в направлении распространения волны (рис.1, а).
Причиной возникновения продольной волны является сжатия/растяжения, т.е. сопротивление среды изменению ее объема. В жидкостях или газах такая деформация сопровождается разрежением или уплотнением частиц среды. Продольные волны могут распространяться в любых средах – твердых, жидких и газообразных.
Примерами продольных волн являются волны в упругом стержне или звуковые волны в газах.
Поперечные волны
ОПРЕДЕЛЕНИЕ
Поперечная волна – это волна, при распространении которой смещение частиц среды происходит в направлении, перпендикулярном распространению волны (рис.1,б).
Причиной поперечной волны является деформация сдвига одного слоя среды относительно другого. При распространении поперечной волны в среде образуются гребни и впадины. Жидкости и газы, в отличие от твердых тел, не обладают упругостью по отношению к сдвигу слоев, т.е. не оказывают сопротивления изменению формы. Поэтому поперечные волны могут распространяться только в твердых телах.
Примерами поперечных волн могут служить волны, бегущие по натянутой веревке или по струне.
Волны на поверхности жидкости не являются ни продольными, ни поперечными. Если бросить на поверхность воды поплавок, то можно увидеть, что он движется, покачиваясь на волнах, по круговой . Таким образом, волна на поверхности жидкости имеет как поперечную, так и продольную компоненты. На поверхности жидкости также могут возникать волны особого типа – так называемые поверхностные волны . Они возникают в результате действия и силы поверхностного натяжения.
Примеры решения задач
ПРИМЕР 1
| Задание | Определить направление распространения поперечной волны, если поплавок в некоторый момент времени имеет направление скорости, указанное на рисунке.
|
| Решение | Сделаем рисунок.
Начертим поверхность волны вблизи поплавка через некоторый промежуток времени , учитывая, что за это время поплавок опустился вниз, так как его в момент времени была направлена вниз. Продолжив линию вправо и влево, покажем положение волны в момент времени . Сравнив положение волны в начальный момент времени (сплошная линия) и в момент времени (пунктирная линия), делаем вывод о том, что волна распространяется влево. |


В этом параграфе нами будет рассмотрена задача о продольных колебаниях однородного стержня. Стержень - это тело цилиндрической (в частности, призматической) формы, для растяжения или сжатия которого надо приложить известное усилие. Мы будем считать, что все силы действуют вдоль оси стержня и каждое из поперечных сечений стержня (рис. 23) перемещается поступательно только вдоль оси стержня.
Обычно это предположение оправдывается, если поперечные размеры стержня малы по сравнению с его длиной, а силы, действующие вдоль оси стержня, сравнительно невелики. На практике продольные колебания возникают чаще всего тогда, когда стержень предварительно немного растягивается или, наоборот, сжимается, а затем предоставляется самому себе. В этом случае в нем возникают свободные продольные колебания. Выведем уравнения этих колебаний.
Направим ось абсцисс по оси стержня (рис. 23); в состоянии покоя концы стержня имеют соответственно абсциссы Рассмотрим сечение ; - его абсцисса в состоянии покоя.

Смещение этого сечения в любой момент времени t будет характеризоваться функцией для отыскания которой мы и должны составить дифференциальное уравнение. Найдем прежде всего относительное удлинение участка стержня, ограниченного сечениями Если абсцисса сечения в состоянии покоя , то смещение этого сечения в момент времени t с точностью до бесконечно малых высшего порядка равно
Поэтому относительное удлинение стержня в сечении с абсциссой в момент времени t равно
Считая, что силы, вызывающие это удлинение, подчиняются закону Гука, найдем величину силы натяжения Т, действующей на сечение :
![]() (5.2)
(5.2)
где - площадь поперечного сечения стержня, а - модуль упругости (модуль Юнга) материала стержня. Формула (5.2) должна быть хорошо известна читателю из курса сопротивления материалов.
Соответственно сила действующая на сечение равна
Поскольку силы заменяют действие отброшенных частей стержня, их результирующая равна разности
Считая выделенный участок стержня материальной точкой с массой , где - объемная плотность стержня, и применяя к нему второй закон Ньютона, составим уравнение
![]()
Сокращая на и вводя обозначение получим дифференциальное уравнение свободных продольных колебаний стержня
![]()
Если дополнительно предпоюжить, что к стержню приложена внешняя сила рассчитанная на единицу объема и действующая вдоль оси стержня, то к правой части соотношения (5 3) добавится слагаемое и уравнение (5.4) примет вид
![]()
что в точности совпадает с уравнением вынужденных котебаний струны.
Перейдем теперь к установлению начальных и краевых условий задачи и рассмотрим практически наиболее интересный случай, когда один конец стержня закреплен, и другой - свободен.
На свободном конце краевое условие будет иметь иной вид. Так как на этом конце внешние силы отсутствуют, то должна быть равна нулю и сила Т, действующая в сечении , т. е.
![]()
![]()
Колебания происходят оттого, что в начальный момент стержень был деформирован (растянут или сжат) и точкам стержня были приданы некоторые начальные скорости. Следовательно, мы должны знать смещение поперечных сечений стержня в момент
![]()
а также начальные скорости точек стержня
![]()
Итак, задача о свободных продольных колебаниях стержня, закрепленного на одном конце, возникающих благодаря начальному сжатию или растяжению, привела нас к уравнению
с начальными условиями
и краевыми условиями
![]()
Именно последнее условие и отличает с математической точки зрения рассматриваемую задачу от задачи о колебаниях струны, закрепленной на обоих концах.
Будем решать поставленную эадачу методом Фурье, т. е. отыскивать частные решения уравнения, удовлетворяющие краевым условиям (5.8), в виде
Так как дальнейший ход решения аналогичен уже изложенному в § 3, ограничимся только краткими указаниями. Дифференцируя функцию , подставляя полученные выражения в (5.6) и разделяя переменные, получим
![]()
(Предоставляем читателю самостоятельно установить, что в силу краевых условий постоянная в правой части не может быть числом положительным или нулем.) Общее решение уравнения имеет вид
В силу условий, наложенных на функцию будем иметь
Решения, не тождественно равные нулю, будут получаться только при соблюдении условия , т. е. при , где k может принимать значения
Итак, собственными числами задачи служат числа
Каждому соответствует собственная функция
![]()
Как мы уже знаем, умножая любую из собственных функций на произвольную постоянную, будем получать решение уравнения с поставленными краевыми условиями. Легко проверить, что, придавая числу k отрицательные значения, мы не получим новых собственных функций (например, при будет получаться функция, отличающаяся от собственной функции ) только знаком),
Докажем прежде всего, что собственные функции (5.11) ортогональны в интервале . Действительно, при

Если же , то
Доказать ортогональность собственных функций ожно и иначе, не опираясь на их явные выражения, а пользуясь только дифференциальным уравнением и краевыми усювиями. Пусть и - два различных собственных числа, и - соответствующие им собственные функции. По определению эти функции удовлетворяют уравнениям
и краевым условиям. Умножим первое из уравнений на второе на и вычтем одно из другого.
МЕХАНИКА
УДК 531.01/534.112
ПРОДОЛЬНЫЕ КОЛЕБАНИЯ ПАКЕТА СТЕРЖНЕЙ
А.М. Павлов, А.Н. Темнов
МГТУ им. Н.Э. Баумана, Москва, Российская Федерация e-mail: [email protected]; [email protected]
В вопросах динамики жидкостных ракет важную роль играет проблема устойчивости движения ракеты при возникновении продольных упругих колебаний. Появление таких колебаний может привести к установлению автоколебаний, которые в случае неустойчивости ракеты в продольном направлении могут привести к ее быстрому разрушению. Сформулирована задача о продольных колебаниях ракеты пакетной схемы, в качестве расчетной модели использован пакет стержней. Принято, что жидкость в баках ракеты "заморожена", т.е. собственные движения жидкости не учтены. Сформулирован закон баланса полной энергии для рассматриваемой задачи и приведена ее операторная постановка. Приведен численный пример, для которого определены частоты, построены и проанализированы формы собственных колебаний.
Ключевые слова: продольные колебания, частота и форма колебаний, пакет стержней, закон баланса полной энергии, самосопряженный оператор, спектр колебаний, POGO.
SYSTEM OF RODS LONGITUDINAL VIBRATIONS А.М. Pavlov, АЛ. Temnov
Bauman Moscow State Technical University, Moscow, Russian Federation e-mail: [email protected]; [email protected]
In questions of dynamics of liquid fuel rockets the problem of motion stability for this rocket has an important role with the appearance of longitudinal elastic vibrations. An occurrence of such kind vibrations can evoke self-vibrations which may cause rapid destruction of the rocket in case of rocket instability within longitudinal direction. The problem on longitudinal vibrations of the liquid fuel rocket based on the packet scheme has been formulated using package rods as computational model. It is assumed that the liquid in the rocket tanks is "frozen", i.e. proper motions of the liquid are not included. For this problem energy conservation principle was formulated and its operator staging is given. There is a numerical example, for which the frequencies have been determined, forms of Eigen vibration were built and analyzed.
Keywords: longitudinal vibrations, eigen modes and frequencies, rods model, energy conservation principle, selfadjoint operator, vibration spectrum, POGO.
Введение. В настоящее время в России и за рубежом для вывода на требуемую орбиту полезного груза часто используют ракеты-носители (РН) пакетной компоновки с одинаковыми боковыми блоками, равномерно распределенными вокруг центрального блока.
Исследования колебаний пакетных конструкций наталкиваются на определенные трудности, связанные с динамическим воздействием боковых и центрального блоков . В случае симметрии компоновки РН сложное, пространственное взаимодействие блоков пакетной конструкции можно разделить на конечное число типов колебаний, одним из которых являются продольные колебания центрального и боковых блоков . Математическая модель продольных колебаний подобной конструкции в виде пакета тонкостенных стержней подробно рассмотрена в работе . Рис. 1. Схема централь- В настоящей статье приведены теоретиче-ного стержня ские и вычислительные результаты продоль-
ных колебаний пакета стержней, дополняющие исследование, выполненное А.А. Пожалостиным .
Постановка задачи. Рассмотрим другие продольные колебания пакета стержней, состоящего из центрального стержня длиной l0 и N боковых стержней одинаковой длины j = l, (l0 > lj), j = 1, 2,..., N, скрепленных в точке А (xA = l) (рис. 1) с центральными пружинными элементами жесткостью k.
Введем неподвижную систему отсчета ОХ и предположим, что жесткость стержней EFj (x), распределенная масса mj (x) и возмущение q (x,t) являются ограниченными функциями координаты x:
0 0 < mj < mj (x) < Mj; (1) 0 Пусть при продольных колебаниях в сечениях стержней с координатой x возникают смещения Uj (x, t), определяемые по уравнениям mj (x) ^ - ¿(eFj (x) ^ = qj (x,t), j = 0,1, 2,..., N, (2) граничными условиями отсутствия нормальных сил на концах стержней 3 =0, х = 0, ^ = 1, 2, 0, x = 0, x = l0; условиями равенства нормальных сил, возникающих в стержнях, EF-3 = F x = l силам упругости пружинных элементов FпPJ = к (щ (ха) - щ (¡,)); (4) ЕУодХ (ха - 0) - EFодХ (ха + 0) = , х = ха; условием равенства перемещений в точке ха центрального стержня Щ (ха-о) = Щ (ха+о) и начальными условиями Щ у (х, 0) - Щ (х) ; , _ щ (х, 0) = Щ (х), где щ (х, 0) = "д^1 (х, 0). Закон баланса полной энергии. Умножим уравнение (2) на щ (х,£), проинтегрируем по длине каждого стержня и сложим результаты, используя граничные условия (3) и условие согласования (4). В результате получим ({ 1 ^ [ (диЛ 2 тз (х) "БТ" (х+ dt | 2 ^ J 3 w V dt N x „ ч 2 .. N „ i. 1 ^ Г „„ , f дп3\ , 1 ^ Гj 1 N /* i дпЛ 2 1 N fl j EF3 dx +2^Уо Ы (x - -)(no - Uj)2 dx = / ^ (х, £) их у (х,£) (х, (6) где 8 (х - ¡у) - дельта-функция Дирака. В уравнении (6) первое слагаемое в фигурных скобках представляет собой кинетическую энергию Т (¿) системы, второе - потенциальную энергию Пр (£), обусловленную деформацией стержней, а третье - потенциальную энергию Пк (£) пружинных элементов, которая при наличии упругих деформаций стержней может быть записана в виде Пк (*) = 2 £ / Су (¡у) 8 (х - ¡1) Е^ (¡у) (ддит (¡1)) 2 (х, Су = Еу. Уравнение (6) показывает, что изменение полной энергии в единицу времени рассматриваемой механической системы равно мощности внешнего воздействия. При отсутствии внешнего возмущения q (x,t) получаем закон сохранения полной энергии: T (t) + Пр (t) + Пк (t) = T (0) + Пр (0) + Пк (0). Операторная постановка. Закон баланса энергии показывает, что для любого момента времени t функции Uj (x, t) можно рассматривать как элементы гильбертова пространства L2j(; m3 (x)), определенные на длине ¡i скалярным произведением (us,Vk)j = J mj (x) usVkdx 0 и соответствующей нормой. Введем гильбертово пространство H, равное ортогональной сумме L2j, H = L20 Ф L21 Ф... Ф L2N, вектор-функцию U = (uo, Ui,..., uN)т и оператор A, действующий в пространстве H согласно соотношению AU = diag (A00U0, A11U1,..., Annun). mj (x) dx \ j dx " операторы, определенные на множестве Б (А33) С Н функций, удовлетворяющих условиям (3) и (4). Исходная задача (1)-(5) вместе с начальными условиями запишется в виде Аи = f (*), и (0) = и0, 17(0) = и1, (7) где f (*) = (до (*) ,51 (*),..., Ям (¿))т. Лемма. 1. Если выполнены первые два условия (1), то оператор А в эволюционной задаче (7) - неограниченный, самосопряженный, положительно определенный в пространстве Н оператор (Аи,К)н = (и,АК)н, (Аи, и)я > с2 (и, и)я. 2. Оператор А порождает энергетическое пространство НА с нормой, равной удвоенному значению потенциальной энергии колебаний пакета стержней 3 \ ^ I з)2 = 2П > 0. (8) IIUIIA = £/ EF^^J dx + k £ (uo - U)2 = 2П > 0. < Оператор А неограничен в пространстве Н, поскольку неограничен каждый диагональный элемент А33. Самосопряженность и положительная определенность оператора А проверяются непосредственно: (AU, v)h =/m (x) (-^| (EFo (x) ^j) Vo (x) dx+ +£ jm(x) (- jx) | (ef- (x) dndxa))v-(x) dx=... = EFo (x) uo (x) vo (x) dx - EFo (x) U) (x) vo (x) J EFo (x) uo (x) vo (x) dx - EFo (x) uo (x) ?o (x) + ^^ / EF- (x) u- (x) vo (x) dx - ^^ EF- (x) u- (x) v- (x) J EFo (x) uo (x) v" (x) dx - EFo (xa - 0) uo (xa - 0) vo (xa) + 0 EFo (xa + 0) uo (xa + 0) vo (xa) - £ EF- (/-) u- (/-) v- (/-) + J EF- (x) u- (x) v- (x) dx = J EFo (x) uo (x) vo (x) dx+ -=100 + £ / EF.,- (x) u- (x) г?- (x) dx+ o O (xa) - £ EF- (/-) u- (/-) v?"- (/-) = EFo (x) uo (x) v?"o (x) dx+ -=10 + £ / EF- (x) u- (x) v- (x) dx+ -=1 0 - + £ k (uo (xa) - u- (/-)) (vo (xa) - v- (/-)) = (U, A?)H (AU, U)H = ... = I EF0 (x) u"2 (x) dx - EF0 (x) u0 (x) u0 (x) J EF0 (x) u"0 (x) dx - EF0 (x) u0 (x) u0 (x) + ^^ / EFj (x) u"2 (x) dx - ^^ EFj (x) uj (x) u3 (x) "J EF°(x) u"2 (x) dx 4EF0 (x) u"2 (x) dx+£ JEFj (x) u"2 (x) dx У^ k (u0 (l) uj (l) - u2 (/)) + u0 (l) ^ k (u0 (l) - uj (l)) = EF0 (x) u"2 (x) dx + / EF0 (x) u"0 (x) dx + S / EFj (x) u"2 (x) dx + k ^ (u0 (l) - uj (l))2 > c2 (U, U)H Из приведенных результатов следует, что энергетическая норма оператора A выражается формулой (8). Разрешимость эволюционной задачи. Сформулируем следующую теорему. Теорема 1. Пусть выполнены условия U0 £ D (A1/2) , U0 £ H, f (t) £ C (; H), тогда задача (7) имеет единственное слабое решение U (t) на отрезке , определяемое по формуле U (t) = U0 cos (tA1/2) +U1 sin (tA1/2) +/sin ((t - s) A1/2) A-1/2f (s) ds. 5 отсутствии внешнего возмущения f (£) выполняется закон сохранения энергии 1 II A 1/2UИ2 = 1 1 II A1/2U 0|H. < Эволюционная задача (7) - это стандартная задача Коши для дифференциального операторного уравнения гиперболического типа, для которого выполнены все условия теоремы о разрешимости . Собственные колебания пакета стержней. Примем, что на стержневую систему не действует поле внешних сил: f (t) = 0. В этом случае движения стержней будем называть свободными. Свободные движения стержней, зависящие от времени t по закону exp (iwt), назовем собственными колебаниями. Приняв в уравнении (7) U (ж, t) = U (ж) eiWÍ, получим спектральную задачу для оператора A: AU - AEU = 0, Л = ш2. (9) Свойства оператора A позволяют сформулировать теорему о спектре и свойствах собственных функций . Теорема 2. Спектральная задача (9) о собственных колебаниях пакета стержней имеет дискретный положительный спектр 0 < Ai < Л2 < ... < Ak < ..., Ak ^ то и систему собственных функций {Uk (ж)}^=0, полную и ортогональную в пространствах H и HA, при этом выполнены следующие формулы ортогональности: (Ufe, Us)H = £ m (xj UfejMSjdx = j=0 0 (Uk= £/Ц^) d*+ K («feo - Mfej) (uso -) = Afeífes. j=i Исследование спектральной задачи в случае однородного пакета стержней. Представив функцию перемещений м- (ж,£) в виде м- (ж,£) = м- (ж) , после разделения переменных получим спектральные задачи для каждого стержня: ^Ои + Лм = 0, ^ = 0,1,2,..., N (10) которые запишем в матричной форме 4 £ + Ли = 0, А = -,-,-,...,- \ т0 т1 т2 т« и = (и0, и1, и2,..., и«)т. Решение и анализ полученных результатов. Обозначим функции перемещения для центрального стержня на участке как и01 и на участке как и02 (ж). При этом для функции и02 начало координат перенесем в точку с координатой /. Для каждого стержня представим решение уравнения (10) в виде Для нахождения неизвестных констант в (11) воспользуемся сформулированными выше граничными условиями. Из однородных граничных условий можно определить некоторые константы, а именно: C02 = C12 = C22 = C32 = C42 = ... = CN 2 = 0. В итоге остается найти N + 3 констант: C01, C03, C04, C11, C21, C31, C41,..., CN1. Для этого решим N + 3 уравнений относительно N + 3 неизвестных. Запишем полученную систему в матричной форме: (A) {C} = {0} . Здесь {C} = {C01, C03, C04, C11, C21, C31, C41,..., Cn 1}т - вектор неизвестных; (A) - характеристическая матрица, cos (Л1) EF0 Л sin (Л1) + Л sin (Л (Zo - 1)) Л cos (Л (Zo - 1)) 0 00 0 \ -1 0 0000 0 y 00 00 0 000Y а = к соэ ^ ^А-Л^ ; в = -к со8((.40-01Л)1/2 ^ ; 7 = (А4"-1 л) 1/2 ап ((А"1л) 1/2 + к сов ((А"1л) 1/2 ; (~ \ 1/2 ~ Л= ^Л] ; А-- : 3 = 0. Для нахождения нетривиального решения в качестве переменной примем константу С01 € М. Имеем два варианта: С01 = 0; С01 = 0. Пусть С01 = 0, тогда С03 = С04 = 0. В этом случае нетривиальное решение может быть получено, если 7 = 0 из (12) при выполнении дополнительного условия £ с-1 = 0, (13) которое может быть получено из третьего уравнения системы (12). В итоге получаем простое частотное уравнение ЕР (А"1 Л)1/2 вт ((А"1^1/2 П + зз у \ V зз K cos ^ (A-/a) 1/2 ^ = 0, j G , совпадающее с частотным уравнением для стержня упруго закрепленного на одном конце, который можно рассматривать как первую парциальную систему. В этом случае все возможные комбинации движений боковых стержней, удовлетворяющих условию (13), можно условно разделить на группы, соответствующие различным комбинациям фаз (в рассматриваемом случае фаза определяется знаком С.д). Если принять боковые стержни идентичными, то имеем два варианта: 1) Сд = 0, тогда число таких комбинаций п для различных N можно вычислить по формуле п = N 2, где - функция деления без остатка; 2) какая-либо (или какие-либо) из констант С- равны 0, тогда число возможных комбинаций возрастает и может быть определено по формуле £ [(N - m) div 2]. Пусть Coi = 0, тогда Cn = C21 = C31 = C41 = ... = CN1 = = C01 (-в/т), где в и y - комплексы, входящие в (12). Из системы (12) также имеем: C03 = C01 cos (Л/); C04=C03 tg (Л (/0 - /)) = C01 cos (A/) x x tg (Л (/0 - /)), т.е. все константы выражены через C01. Частотное уравнение принимает вид EFo U-o1 Л tg A-1 Л) " (lo - l)) - K2 cos | í a!-,1 Л В качестве примера рассмотрим систему с четырьмя боковыми стержнями. Кроме описанного выше способа для этого примера можно записать частотное уравнение для всей системы, вычислив определитель матрицы А и приравняв его нулю. Приведем его вид Y4 (Л sin (Л (/o - /)) cos (Л/) EFoЛ+ Л cos (Л (/o - /)) (EFoЛ sin (Л/) + 4в)) - 4авт3Л cos (Л(/0 - /)) = 0. Графики трансцендентных частотных уравнений для рассмотренных выше случаев представлены на рис. 2. В качестве исходных данных были приняты следующие: EF = 2 109 Н; EF0 = 2,2 109 Н; k = 7 107 Н/м; m = 5900 кг/м; mo = 6000 кг/м; / = 23; /о = 33 м. Значения первых трех частот колебаний рассматриваемой схемы приведены ниже: n..................................... и, рад/с.............................. 1 2 3 20,08 31,53 63,50 Рис. 2. Графики трансцендентных частотных уравнений для Coi = 0 (i) и Coi = 0 (2) Приведем формы колебаний, соответствующие полученным решениям (в общем случае формы колебаний не нормированы). Формы колебаний, соответствующие первой, второй, третьей, четвертой, 13 и 14 частотам, приведены на рис. 3. При первой частоте колебаний боковые стержни колеблются с одинаковой формой, но попарно в противофазе Рис.3. Формы колебаний боковых (1) и центральных (2) стержней, соответствующие первой V = 3,20 Гц (а), второй V = 5,02 Гц (б), третьей V = 10,11 Гц (в), четвертой V = 13,60 Гц (г), 13-й V = 45,90 Гц (д) и 14-й V = 50,88 Гц (е) частотам (рис. 3, а), при второй - центральный стержень совершает колебания, а боковые колеблются по одинаковой форме в фазе (рис. 3, б). Следует отметить, что первая и вторая частоты колебаний рассматриваемой стержневой системы соответствуют колебаниям системы, состоящей из твердых тел. При колебании системы с третьей собственной частотой первый раз появляются узлы (рис.3,в). Третья и последующие частоты (рис.3,г) соответствуют уже упругим колебаниям системы. С возрастанием частоты колебаний, связанной с уменьшением влияния упругих элементов, частоты и формы колебаний стремятся к парциальным (рис.3,д, е). Кривые функций, точки пересечения которых с осью абсцисс являются решениями трансцендентных уравнений, представлены на рис. 4. Согласно рисунку, собственные частоты колебаний системы расположены вблизи парциальных частот. Как было отмечено выше, при увеличении частоты сближение собственных частот с парциальными усиливается. В результате частоты, при которых колеблется вся система, условно разделяются на две группы: близкие к парциальным частотам бокового стержня и частоты, близкие к парциальным частотам центрального стержня. Выводы. Рассмотрена задача о продольных колебаниях пакета стержней. Описаны свойства поставленной краевой задачи и спектра ее собственных значений. Предложено решение спектральной задачи для произвольного числа однородных боковых стержней. Для численного примера найдены значения первых частот колебаний и построены соответствующие им формы. Также были выявлены некоторые характерные свойства построенных форм колебаний. Рис. 4. Кривые функций, точки пересечения которых с осью абсцисс являются решениями трансцендентных уравнений, для СоХ = 0 (1), Сох = 0 (2) совпадают с первой парциальной системой (боковой стержень, закрепленный на упругом элементе в точке х = I) и второй парциальной системы (5) (центральный стержень, закрепленный на четырех упругих элементах в точке А) ЛИТЕРАТУРА 1. Колесников К.С. Динамика ракет. М.: Машиностроение, 2003. 520 с. 2. Баллистические ракеты и ракеты-носители / О.М. Алифанов, А.Н. Андреев, В.Н. Гущин и др. М.: Дрофа, 2004. 511 с. 3. Рабинович Б.И. Введение в динамику ракет-носителей космических аппаратов. М.: Машиностроение, 1974. 396 с. 4. Parameter study on POGO stability of liquid rockets / Z. Zhao, G. Ren, Z. Yu, B. Tang, Q. Zhang // J. of Spacecraft and Rockets. 2011. Vol. 48. Is. 3. P. 537-541. 5. Балакирев Ю.Г. Методы анализа продольных колебаний ракет-носителей с жидкостным двигателем // Космонавтика и ракетостроение. 1995. № 5. С. 50-58. 6. Балакирев Ю.Г. Особенности математической модели жидкостной ракеты пакетной компоновки как объекта управлении // Избранные проблемы прочности современного машиностроения. 2008. С. 43-55. 7. Докучаев Л.В. Совершенствование методов исследований динамики ракеты-носителя пакетной конструкции с учетом их симметрии // Космонавтика и ракетостроение. 2005. № 2. С. 112-121. 8. Пожалостин А.А. Разработка приближенных аналитических методов расчета собственных и вынужденных колебаний упругих оболочек с жидкостью: дис. ... д-ра техн. наук. М., 2005. 220 с. 9. Крейн С.Г. Линейные дифференциальные уравнения в банаховых пространствах. М.: Наука, 1967. 464 с. 10. Копачевский И.Д. Операторные методы математической физики. Симферополь: ООО "Форма", 2008. 140 с. Kolesnikov K.S. Dinamika raket . Moscow, Mashinostroenie Publ., 2003. 520 p. Alifanov O.N., Andreev A.N., Gushchin V.N., eds. Ballisticheskie rakety i rakety-nositeli . Moscow, Drofa Publ., 2003. 511 p. Rabinovich B.I. Vvedenie v dinamiku raket-nositeley kosmicheskikh apparatov . Moscow, Mashinostroenie Publ., 1974. 396 p. Zhao Z., Ren G., Yu Z., Tang B., Zhang Q. Parameter study on POGO stability of liquid fuel rocket. J. Spacecraft and Rockets, 2011, vol. 48, iss. 3, pp. 537-541. Balakirev Yu.G. Methods of analysis of longitudinal vibrations of launch vehicles with liquid propellant engine. Kosm. i raketostr. , 1995, no. 5, pp. 50-58 (in Russ.). Balakirev Yu.G. Osobennosti matematicheskoy modeli zhidkostnoy rakety paketnoy komponovki kak ob"ekta upravlenii . Sb. "Izbrannye problemy prochnosti sovremennogo mashinostroeniya" . Moscow, Fizmatlit Publ., 2008. 204 p. (cited pp. 4355). Dokuchaev L.V. Improvement of methods for studying the dynamics of clustered launch vehicle considering their symmetry. Kosm. i raketostr. , 2005, no. 2, pp. 112-121 (in Russ.). Pozhalostin A.A. Razrabotka priblizhennykh analiticheskikh metodov rascheta sobstvennykh i vynuzhdennykh kolebaniy uprugikh obolochek s zhidkost"yu. Diss. doct. tekhn. nauk . Kreyn S.G. Lineynye differentsial"nye uravneniya v Banakhovykh prostranstvakh . Moscow, Nauka Publ., 1967. 464 p. Kopachevskiy I.D. Operatornye metody matematicheskoy fiziki . Simferopol", Forma Publ., 2008. 140 p. Статья поступила в редакцию 28.04.2014 Павлов Арсений Михайлович - студент кафедры "Космические аппараты и ракеты-носители" МГТУ им. Н.Э. Баумана. Специализируется в области ракетно-космической технологии. МГТУ им. Н.Э. Баумаш, Российская Федерация, 105005, Москва, 2-я Бауманская ул., д. 5. Pavlov A.M. - student of "Spacecrafts and Launch Vehicles" department of the Bauman Moscow State Technical University. Specialist in the field of rocket-and-space technology. Bauman Moscow State Technical University, 2-ya Baumanskaya ul. 5, Moscow, 105005 Russian Federation. Темнов Александр Николаевич - канд. физ.-мат. наук, доцент кафедры "Космические аппараты и ракеты-носители" МГТУ им. Н.Э. Баумана. Автор более 20 научных работ в области механики жидкости и газа и ракетно-космической технологии. МГТУ им. Н.Э. Баумаш, Российская Федерация, 105005, Москва, 2-я Бауманская ул., д. 5. Temnov A.N. - Cand. Sci. (Phys.-Math.), assoc. professor of "Spacecrafts and Launch Vehicles" department of the Bauman Moscow State Technical University. Author of more than 20 publications in the field of fluid and gas mechanics and rocket-and-space technology. Bauman Moscow State Technical University, 2-ya Baumanskaya ul. 5, Moscow, 105005 Russian Federation. Продольные волны Определение 1
Волна, в которой колебания происходят в направлении ее распространения. Примером продольной волны может служить звуковая волна. Рисунок 1. Продольная волна
Механические продольные волны также называют компрессионными волнами или волнами сжатия, так как они производят сжатие при движении через среду. Поперечные механические волны также называют "Т-волны" или "волны сдвига". Продольные волны включают в себя акустические волны (скорость частиц, распространяющихся в упругой среде) и сейсмические Р-волны (созданные в результате землетрясений и взрывов). В продольных волнах, смещение среды параллельно направлению распространения волны. В случае продольных гармонических звуковых волн , частота и длина волны может быть описана формулой: $y_0-$ амплитуда колебаний;\textit{} $\omega -$ угловая частота волны; $c-$ скорость волны. Обычная частота $\left({\rm f}\right)$волны задается Скорость звука распространения зависит от типа, температуры и состава среды, через которую он распространяется. В упругой среде, гармоническая продольная волна проходит в положительном направлении вдоль оси. Определение 2
Поперечная волна
- волна, в которой направление молекул колебаний среды перпендикулярно к направлению распространения. Примером поперечных волн служит электромагнитная волна. Рисунок 2. Продольная и поперечная волны
Рябь в пруду и волны на струне легко представить в виде поперечных волн. Рисунок 3. Световые волны являются примером поперечной волны
Поперечные волны являются волнами, которые колеблются перпендикулярно к направлению распространения. Есть два независимых направления, в которых могут возникать волновые движения. Определение 3
Двумерные поперечные волны демонстрируют явление, называемое поляризацией.
Электромагнитные волны ведут себя таким же образом, хотя это немного сложнее увидеть. Электромагнитные волны также являются двухмерными поперечными волнами. Пример 1
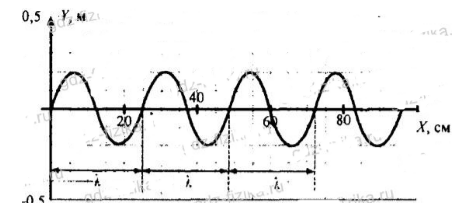
Докажите, что уравнение плоской незатухающей волны ${\rm y=Acos}\left(\omega t-\frac{2\pi }{\lambda }\right)x+{\varphi }_0$ для волны, которая представлена на рисунке, можно записать в виде ${\rm y=Asin}\left(\frac{2\pi }{\lambda }\right)x$. Убедитесь в этом, подставив значения координаты$\ \ x$, которые раны $\frac{\lambda}{4}$; $\frac{\lambda}{2}$; $\frac{0,75}{\lambda}$. Рисунок 4.
Уравнение $y\left(x\right)$ для плоской незатухающей волны не зависит от $t$, значит, момент времени $t$ можно выбрать произвольным. Выберем момент времени $t$ таким, что
\[\omega t=\frac{3}{2}\pi -{\varphi }_0\] \
Подставим это значение в уравнение:
\ \[=Acos\left(2\pi -\frac{\pi }{2}-\left(\frac{2\pi }{\lambda }\right)x\right)=Acos\left(2\pi -\left(\left(\frac{2\pi }{\lambda }\right)x+\frac{\pi }{2}\right)\right)=\] \[=Acos\left(\left(\frac{2\pi }{\lambda }\right)x+\frac{\pi }{2}\right)=Asin\left(\frac{2\pi }{\lambda }\right)x\] \ \ \[{\mathbf x}{\mathbf =}\frac{{\mathbf 3}}{{\mathbf 4}}{\mathbf \lambda }{\mathbf =}{\mathbf 18},{\mathbf 75}{\mathbf \ см,\ \ \ }{\mathbf y}{\mathbf =\ }{\mathbf 0},{\mathbf 2}{\cdot}{\mathbf sin}\frac{{\mathbf 3}}{{\mathbf 2}}{\mathbf \pi }{\mathbf =-}{\mathbf 0},{\mathbf 2}\] Ответ: $Asin\left(\frac{2\pi }{\lambda }\right)x$ Рассмотрим однородный стержень длины т. е. тело цилиндрической или какой-либо иной формы, для растяжения или изгибания которого надо приложить известное усилие. Последнее обстоятельство и отличает даже самый тонкий стержень от струны, которая, как мы знаем, гнется свободно. В настоящей главе мы займемся приложением метода характеристик к изучению продольных колебаний стержня, причем ограничимся исследованием только таких колебаний, при которых поперечные сечения перемещаясь вдоль оси стержня, остаются плоскими и параллельными друг другу (рис. 6). Подобное допущение оправдано, если поперечные размеры стержня будут невелики по сравнению с его длиной. Если несколько растянуть или сжать стержень вдоль продольной оси, а затем предоставить самому себе, то в нем возникнут продольные колебания. Направим ось вдоль оси стержня и будем считать, что в состоянии покоя концы стержня находятся в точках Пусть абсцисса некоторого сечения стержня, когда последний находится в покое. Обозначим через смещение этого сечения в момент времени тогда смещение сечения с абсциссой будет равно Отсюда ясно, что относительное удлинение стержня в сечении с абсциссой х выражается производной Считая теперь, что стержень совершает малые колебания, можно вычислить в этом сечении натяжение Действительно» применяя закон Гука, найдем, что где модуль упругости материала стержня, площадь его поперечного сечения. Возьмем элемент стержня, заключенный между двумя сечениями, абсциссы которых в состоянии покоя соответственно равны На этот элемент действуют силы натяжения приложенные в этих сечениях, и направленные вдоль оси Результирующая этих сил имеет величину и направлена также вдоль . С другой стороны, ускорение элемента равно вследствие чего мы можем написать равенство где объемная плотность стержня. Положив и сократив на получим дифференциальное уравнение продольных колебаний однородного стержня Форма этого уравнения показывает, что продольные колебания стержня носят волновой характер, причем скорость а распространения продольных волн определяется формулой (4). Если на стержень действует еще внешняя сила рассчитанная на единицу его объема, то вместо (3) получим Это есть уравнение вынужденных продольных колебаний стержня. Как и вообще в динамике, одного уравнения движения (6) недостаточно для полного определения движения стержня. Нужно задать начальные условия, т. е. задать смещения сечений стержня и их скорости в начальный момент времени где и заданные функции в интервале ( Кроме того, должны быть заданы граничные условия на концах стержня. Так, например. Звуковые волны
Поперечные волны



![]()
![]()
![]()